カラーキャリブレーションの攻略法 (3)実際の操作方法に従って、マニュアルを解読
適応(adaptation)
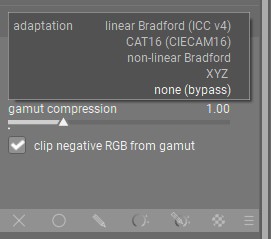
ここで、適応(adaptation)は、図1の次の5種類から選べます。
-
linear Bradford(ICC v4)
-
CAT16(CINEMATIC16)
-
non-linear Bradford
-
XYX
-
なし(one, bypass)
モジュールが色順応変換とチャネルミキシングを実行する作業色空間です。次のオプションが提供されています。
Linear Bradford(1985):これは、昼光に近い光源の場合にはより正確ですが、より難しい光源の場合は色域外の色を生成します。
CAT16(2016):これは、広い色域または飽和したシアンと紫で作業しているときに、架空の色を回避する上でより堅牢です。
Non-linear Bradford(1985):これは線形バージョンよりも良い結果を生み出すことができますが、信頼性はありません。
XYZ:単純なスケーリング空間(輝度Yでスケーリング)。これは、テストとデバッグを目的とする場合を除いて、一般的には推奨されません。
none(disable):適応を無効にし、パイプラインの作業RGB空間を使用します。
線形ブラッドフォード (linear Bradford) CAT空間は、2800 K〜6500Kの昼光および黒体光源に対してより知覚的に正確であることが知られています。 CAT16空間は、青色光などの難しい光源に対してより良い範囲を保持することが知られています。
ポイント1:
通常は、 線形ブラッドフォード (linear Bradford) CAT空間を光源が青い場合には、 CAT16空間を使えばよい。(図2参照)
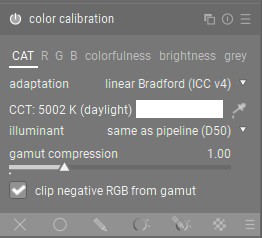
光源(illuminant)
ポイント2:
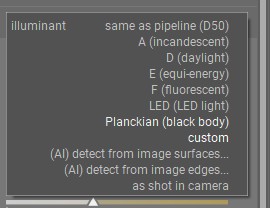
「光源(illuminant)」の説明は、わかりにくいのですが、端的にいえば、次のリストのD50以外のどの方法をとっても、”CIE標準光源(昼光、白熱灯、蛍光灯、等エネルギー、または黒体)のいずれか、または非標準の「LEDライト」光源”が最終的に選択されます。つまり、メニューは、図3のようになっていますが、このうち、次のリストを選択すると、”CIE標準光源(昼光、白熱灯、蛍光灯、等エネルギー、または黒体)のいずれか、または非標準の「LEDライト」光源”が返されます。その場合には、ピッカーを使うことが基本のようです。
-
custom=カスタム
-
same as pipeline (D50)=パイプライン(D50)と同じ
-
(AI) detected from image surface..=(AI)画像表面からの検出
-
(AI) detected from image edges..=(AI)画像のエッジから検出
-
as shot in camera=カメラの撮影条件(これは表示されないこともあります)
この点を理解すれば、次のマニュアルの大筋は理解できると思います。
シーンを照らしたと思われる光源のタイプを次から選択します。
パイプライン(D50)と同じ(same as pipeline (D50)):このモジュールインスタンスでは色適応を実行せず、選択した適応(adaptation) 色空間を使用してチャネルミキシングを実行します。
CIE標準光源(CIE standard illuminant):CIE標準光源(昼光、白熱灯、蛍光灯、等エネルギー、または黒体)のいずれか、または非標準の「LEDライト」光源から選択します。これらの値はすべて事前に計算されています。カメラセンサーのプロファイルが適切である限り、そのまま使用できます。プランキアン (Planckian)軌跡(locus)の近くにある光源の場合、追加の「温度」制御も提供されます(以下を参照)。
カスタム(custom):ニュートラルグレーパッチが画像で使用できる場合、光源の色はカラーピッカーを使用して選択するか、色相および彩度スライダーを使用して手動で指定できます(LCh知覚色空間内)。カラーピッカーの横にある色見本は、CAT補正で使用される計算された光源の色を示しています。カラーピッカーを使用して、AI検出に使用される領域を制限することもできます(下記参照)。
(AI)画像表面からの検出((AI) detect from image surfaces):このアルゴリズムは、YUV空間の彩度(chroma)チャネル間の共分散が高く、チャネル内分散が高い画像パッチの平均色を取得します。言い換えると、灰色であるかのように見える画像の部分を探し、合法的に灰色ではない可能性のある平らな色の表面を破棄します。また、色収差だけでなく色ノイズも破棄します。
(AI)画像のエッジから検出((AI) detect from image edges):「グレーワールド」の仮定に依存するホワイトバランス(white balance)モジュールの自動ホワイトバランスとは異なり、この方法では、「グレーエッジ」の仮定を使用して、ラプラシアン(laplacian)のミンコウスキー( Minkowski )p-norm(p = 8)とそれを最小化する計算によって適切な光源を自動検出します。つまり、エッジはすべてのチャネルで同じ勾配(灰色のエッジ)を持つ必要があると想定しています。これは、以前の表面ベースの検出方法よりもノイズに敏感です。
カメラ撮影条件as shot in camera:カメラが提供するホワイトバランス設定に基づいて光源を計算します。
カラーパッチの左側には、 CCT (相関色温度)の近似値があります。これは、現在使用されている光源にケルビン単位で最も近い温度です。ほとんどの画像処理ソフトウェアでは、温度と色合いの組み合わせを使用してホワイトバランスを設定するのが通例です。ただし、光源が日光から遠く離れている場合、CCTは不正確で無関係になり、CIE(国際照明委員会)はそのような状況での使用を推奨しません。 CCTの読み取り値は、最も近くに見つかったCCTの一致値を意味します。
-
CCTの後に(昼光 daylight)が続く場合、これは、現在の光源が理想的な昼光スペクトル±0.5%に近いことを意味し、したがってCCTの数値は意味があります。
-
CCTの後に(黒体 black body)が続く場合、これは、現在の光源が理想的な黒体(プランク Planckian)スペクトル±0.5%に近いことを意味し、したがってCCTの数値は意味があります。
-
CCTの後に(無効 invalid)が続く場合、これは、昼光または黒体の光スペクトルから遠すぎるため、CCTの数値が無意味であり、おそらく間違っていることを意味します。
上記の光源検出方法のいずれかを使用すると、プログラムは2つの理想化されたスペクトル(昼光と黒体 daylight and black body)を使用して計算された光源がどこにあるかをチェックし、光源 (illuminant)パラメーターで使用する最も正確なスペクトルモデルを選択します。ユーザーインターフェイスはそれに応じて変更されます。温度スライダーは D(昼光 daylight)と Planckian(黒体 black body)に提供され、CCTは意味があります。それ以外の場合は、CIELuv空間の一般的な色相(hue)と彩度(chroma)のスライダーがカスタム(custom)光源用に提供されます。
カスタム(custom)光源から、たとえば、D(昼光 daylight)光源に切り替えると、カスタム光源から最も近いCCTが転送され、昼光モデルによって使用されます。 カスタム光源を使用しているときに(昼光)タグがCCT読み取り値に表示された場合、この変換はほとんど非破壊的(±0.5%)です。同じことが プランク Planckian(黒体 black body)光源にも当てはまります。任意の光源からカスタムへの切り替えは、元の設定に関して100%非破壊的です。 カスタム(custom)から他の光源への切り替えは破壊的であり、CCTの読み取り値が(無効 invalid)としてタグ付けされている場合はおそらく不正確です。
他のハードコードされた光源( illuminants)が利用可能です(以下参照)。その値は標準のCIE光源から得られた絶対値です。シーンを照らすために使用された電球の種類が正確にわかっていて、カメラの入力プロファイルと参照(D65)係数が正確であると信頼できる場合は、これらを直接使用できます。
光源検出モードは、最適なCAT色空間も設定します。 線形ブラッドフォード (linear Bradford) CAT空間は、2800 K〜6500Kの昼光および黒体光源に対してより知覚的に正確であることが知られています。 CAT16空間は、青色光などの難しい光源に対してより良い範囲を保持することが知られています。
ポイント3:
ピッカーのエリアは白と思われる部分を抽出して使うのが基本です。
例を示します。
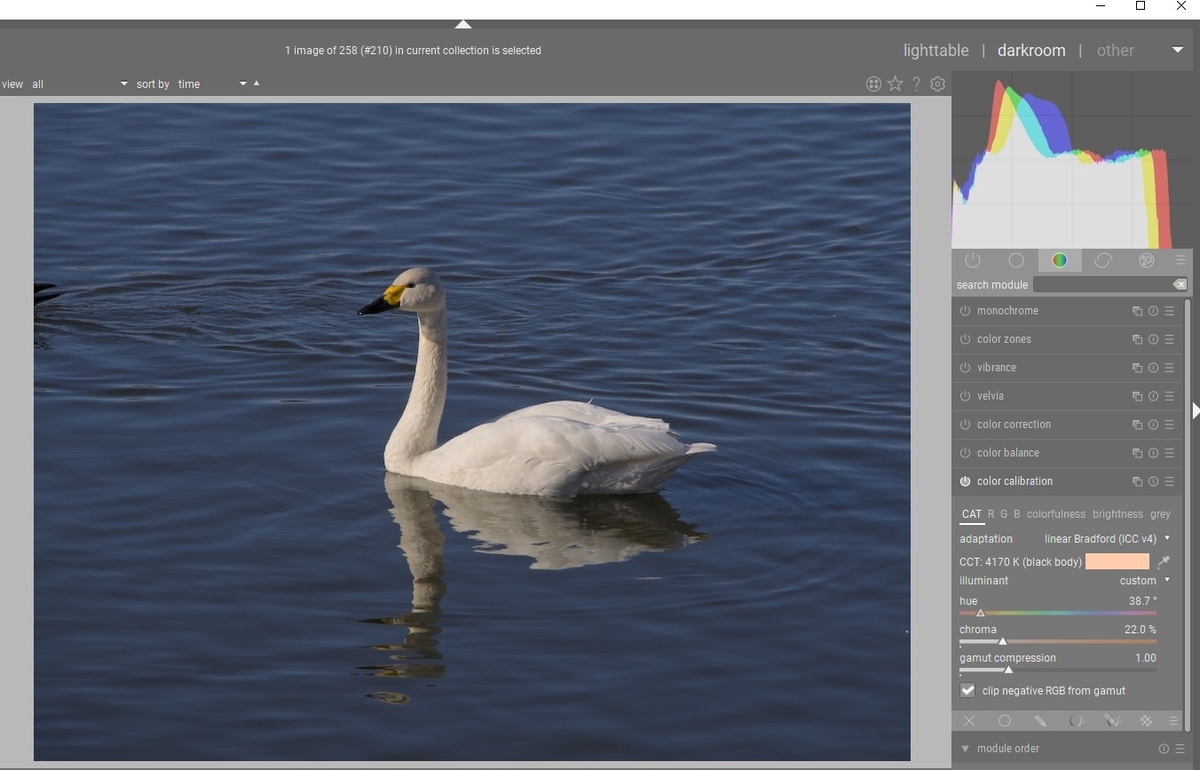
図4が、カスタムを選択した状態です。
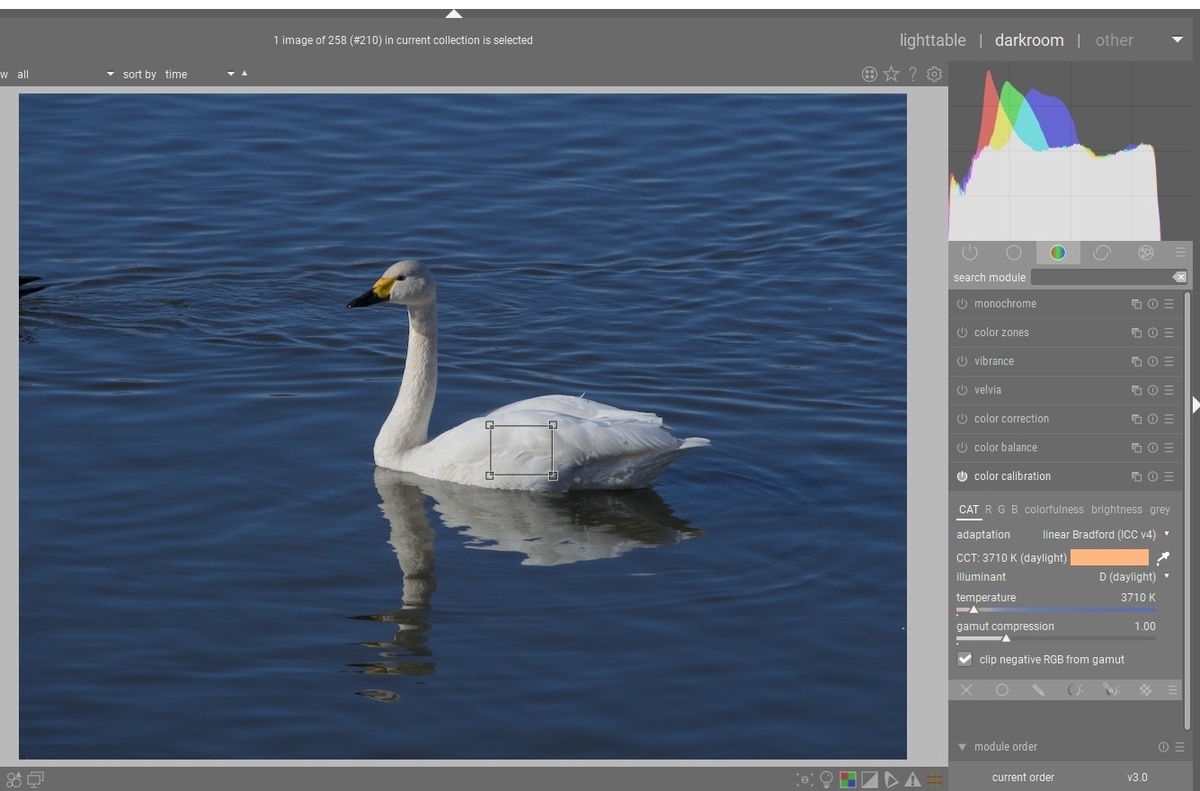
ここで、ピッカーをオンにすると、図5のように、画像全体が評価されます。色は、黄色がかっています。
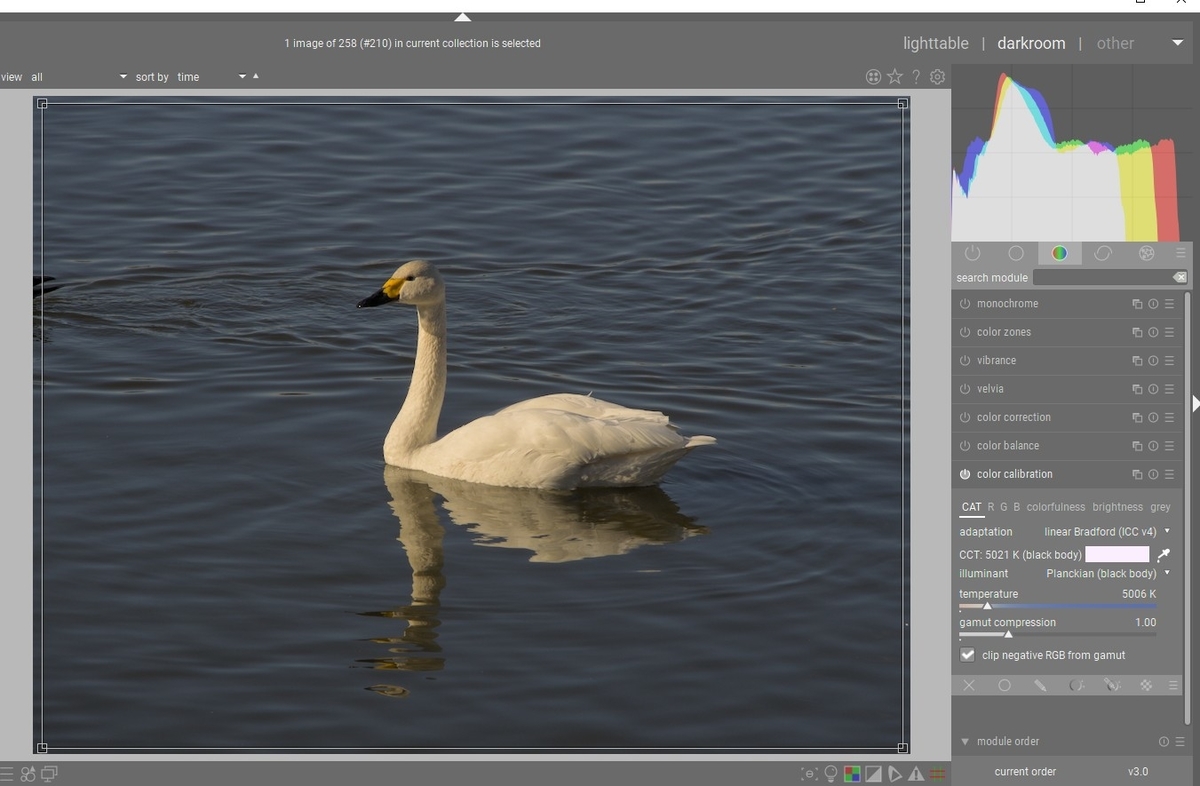
ここで、白に近いと思われる白鳥をサンプリングエリアに設定しなおして、ピッキングした結果が、図6です。
図5と図6を比較すると、色表現が改善されていることがわかります。